Series elastic actuators (SEAs) and variable elastic actuators (VSAs) provide shock resistance, energy storage, and stable force control. However, they usually require extra springs, mechanical parts, and transmissions, increasing size, weight, number of moving parts, and reducing the mechanical efficiency. In particular, this mechanical complexity is one of the significant challenges in the design of wearable and scalable force feedback devices. In this work, flexure variable stiffness actuators (F-VSAs), which combine kinematic transmission, elasticity, and stiffness modulation via a network of folding patterns using flexure hinges, are presented. Thus, F-VSAs allow the creation of robots benefiting from the advantages of SEAs and VSAs without hindering form factor or mechanical efficiency. To illustrate the design strategy of F-VSAs, a 4-design-of-freedom (DoF) robot that provides stiffness and force output is presented. An analytical model that estimates the inherent stiffness and the end-effector force output for any given configuration of the folding pattern is proposed. Finally, stiffness modulation and force control of the robot are implemented and good agreement with the predictions from the model is observed. Thus, this novel design strategy allows the creation of compact and scalable robots with stiffness and force output for wearable, rehabilitation, and haptic applications.
Giraud, F.H., Mete, M. and Paik, J. (2022), Flexure Variable Stiffness Actuators. Adv. Intell. Syst., 4: 2100282. https://doi.org/10.1002/aisy.202100282
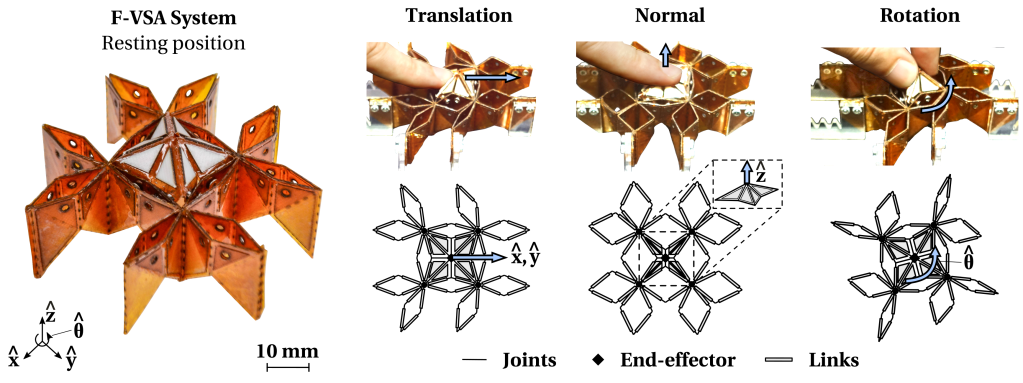
The F-VSA system is composed of several compliant four-bar linkages connected to each other with folding hinges and the out-of-plane mechanism in the center serving as end-effector. These diamonds dictate the kinematics of the platform and serve as series elastic elements, thanks to their built-in compliance, which act as virtual springs. Moreover, by reconfiguring the diamonds’ geometry, this platform can vary the stiffness of these virtual springs. Thus, this device can render variable stiffness and forces by controlling its configuration. It allows the design of compact devices, thanks to the compliant diamond patterns and hinges that combine transmission mechanisms, elastic elements, and variable stiffness.
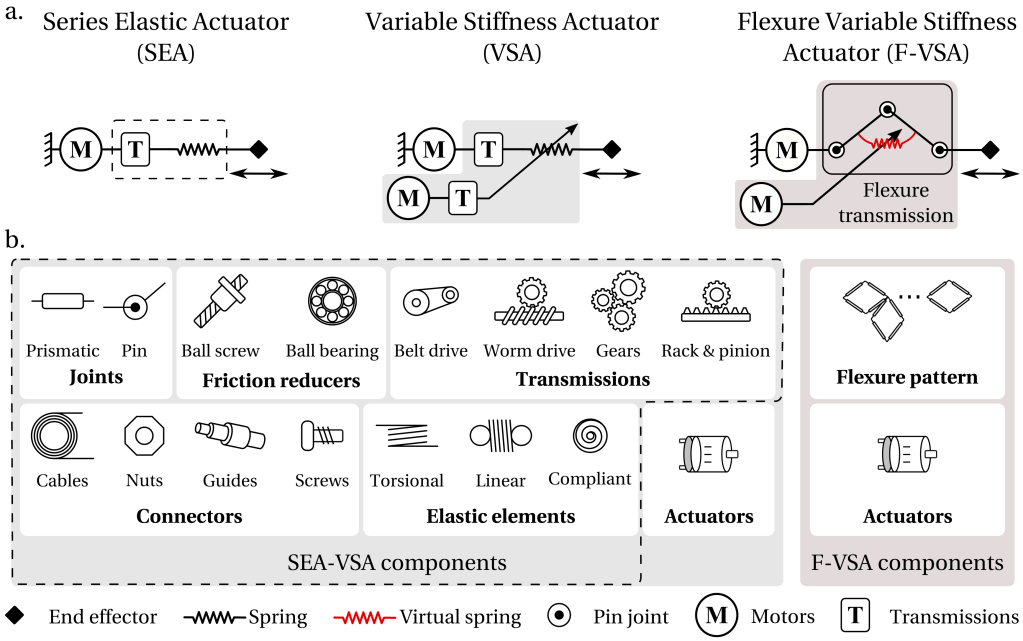
Comparison of SEAs, VSAs, and F-VSAs. SEAs are generally composed of many types of components such as joints, transmissions, connectors, elastic elements, and friction reducers. SEAs cannot adapt the stiffness of their springs to changing conditions. On the other hand, VSAs can vary the stiffness of their elastic elements using additional aforementioned components and extra actuators. However, they suffer from mechanical complexity and bulkiness. As a new approach, F-VSAs incorporate all these components in their flexure transmission, which has virtual springs at its joints and defines the system’s kinematics. We can control the configuration of the flexure transmission to dictate the overall stiffness of the system. Thus, F-VSA method offers a solution to the mechanical complexity issue of VSAs. These three approaches and their design components are summarized in (a) and (b).
The cover picture of Advanced Intelligent Systems: Volume 4, Issue 7